Что является предметом кинематики. Законы ньютона, принцип относительности галилея, принцип суперпозиции сил. Основные понятия кинематики. Механическое движение
Кинематика - раздел механики, изучающий движение тел без учета причин, вызвавших это движение.
Основной задачей кинематики является нахождение положения тела в любой момент времени, если известны его положение, скорость и ускорение в начальный момент времени.
Механическое движение - это изменение положения тел (или частей тела) относительно друг друга в пространстве с течением времени.
Для описания механического движения надо выбрать систему отсчета.
Тело отсчета - тело (или группа тел), принимаемое в данном случае за неподвижное, относительно которого рассматривается движение других тел.
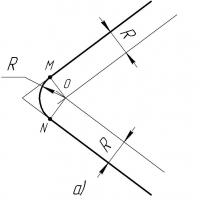
Система отсчета - это система координат, связанная с телом отсчета, и выбранный способ измерения времени (рис. 1).
Положение тела можно определить с помощью радиуса-вектора \(~\vec r\) или с помощью координат.
Радиус-вектор \(~\vec r\) точки Μ - направленный отрезок прямой, соединяющий начало отсчета О с точкой Μ (рис. 2).

Координата x точки Μ - это проекция конца радиуса-вектора точки Μ на ось Ох . Обычно пользуются прямоугольной системой ко ординат. В этом случае положение точки Μ на линии, плоскости и в пространстве определяют соответственно одним (x ), двумя (х , у ) и тремя (х , у , z ) числами - координатами (рис. 3).

В элементарном курсе физики изучают кинематику движения материальной точки.
Материальная точка - тело, размерами которого в данных условиях можно пренебречь.
Этой моделью пользуются в тех случаях, когда линейные размеры рассматриваемых тел много меньше всех прочих расстояний в данной задаче или когда тело движется поступательно.
Поступательным называется движение тела, при котором прямая, проходящая через любые две точки тела, перемещается, оставаясь параллельной самой себе. При поступательном движении все точки тела описывают одинаковые траектории и в любой момент времени имеют одинаковые скорости и ускорения. Поэтому для описания такого движения тела достаточно описать движение его одной произвольной точки.
В дальнейшем под словом "тело" будем понимать "материальная точка".
Линия, которую описывает движущееся тело в определенной системе отсчета, называется траекторией . На практике форму траектории задают с помощью математических формул (y = f (x ) - уравнение траектории) или изображают на рисунке. Вид траектории зависит от выбора системы отсчета. Например, траекторией тела, свободно падающего в вагоне, который движется равномерно и прямолинейно, является прямая вертикальная линия в системе отсчета, связанной с вагоном, и парабола в системе отсчета, связанной с Землей.
В зависимости от вида траектории различают прямолинейное и криволинейное движение.
Путь s - скалярная физическая величина, определяемая длиной траектории, описанной телом за некоторый промежуток времени. Путь всегда положителен: s > 0.
Перемещение \(~\Delta \vec r\) тела за определенный промежуток времени - направленный отрезок прямой, соединяющий начальное (точка M 0) и конечное (точка М ) положение тела (см. рис. 2):
\(~\Delta \vec r = \vec r - \vec r_0,\)
где \(~\vec r\) и \(~\vec r_0\) - радиусы-векторы тела в эти моменты времени.
Проекция перемещения на ось Ox \[~\Delta r_x = \Delta x = x - x_0\], где x 0 и x - координаты тела в начальный и конечный моменты времени.
Модуль перемещения не может быть больше пути\[~|\Delta \vec r| \le s\].
Знак равенства относится к случаю прямолинейного движения, если направление движения не изменяется.
Зная перемещение и начальное положение тела, можно найти его положение в момент времени t:
\(~\vec r = \vec r_0 + \Delta \vec r;\) \(~\left\{ \begin{matrix} x = x_0 + \Delta r_x ; \\ y = y_0 + \Delta r_y . \end{matrix} \right.\)
Скорость - мера механического состояния тела. Она характеризует быстроту изменения положения тела относительно данной системы отсчета и является векторной физической величиной.
Средняя скорость \(~\mathcal h \vec \upsilon \mathcal i\) - векторная физическая величина, численно равная отношению перемещения к промежутку времени, за который оно произошло, и направленная вдоль перемещения (рис. 4):
\(~\mathcal h \vec \upsilon \mathcal i = \frac{\Delta \vec r}{\Delta t}; \qquad \mathcal h \vec \upsilon \mathcal i \upuparrows \Delta \vec r .\)

В СИ единицей скорости является метр в секунду (м/с).
Средняя скорость, найденная по этой формуле, характеризует движение только на том участке траектории, для которого она определена. На другом участке траектории она может быть другой.
Иногда пользуются средней скоростью пути\[~\mathcal h \upsilon \mathcal i = \frac{s}{\Delta t}\], где s - путь, пройденный за промежуток времени Δt . Средняя скорость пути - это скалярная величина.
Мгновенная скорость \(~\vec \upsilon\) тела - скорость тела в данный момент времени (или в данной точке траектории). Она равна пределу, к которому стремится средняя скорость за бесконечно малый промежуток времени \(~\vec \upsilon = \lim_{\Delta t \to 0} \frac{\Delta \vec r}{\Delta t} = \vec r \ "\). Здесь \(~\vec r \ "\) - производная от радиуса-вектора по времени.
В проекции на ось Ох :
\(~\upsilon_x = \lim_{\Delta t \to 0} \frac{\Delta x}{\Delta t} = x".\)
Мгновенная скорость тела направлена по касательной к траектории в каждой ее точке в сторону движения (см. рис. 4).
Ускорение - векторная физическая величина, характеризующая быстроту изменения скорости. Оно показывает, на какую величину изменяется скорость тела за единицу времени.
Среднее ускорение - физическая величина, численно равная отношению изменения скорости ко времени, за которое оно произошло:
\(~\mathcal h \vec a \mathcal i = \frac{\Delta \vec \upsilon}{\Delta t} = \frac{\vec \upsilon - \vec \upsilon_0}{\Delta t} .\)
Вектор \(~\mathcal h \vec a \mathcal i\) направлен параллельно вектору изменения скорости \(~\Delta \vec \upsilon\) (\(~\mathcal h \vec a \mathcal i \upuparrows \Delta \vec \upsilon\)) в сторону вогнутости траектории (рис. 5).

Мгновенное ускорение :
\(~\vec a = \lim_{\Delta t \to 0} \frac{\Delta \vec \upsilon}{\Delta t} = \vec \upsilon \ " .\)
В СИ единицей ускорения является метр на секунду в квадрате (м/с 2).
В общем случае мгновенное ускорение направлено под углом к скорости. Зная траекторию, можно определить направление скорости, но не ускорения. Направление ускорения определяется направлением равнодействующей сил, действующих на тело.
При прямолинейном движении с возрастающей по модулю скоростью (рис. 6, а) векторы \(~\vec a\) и \(~\vec \upsilon_0\) сонаправлены (\(~\vec a \upuparrows \vec \upsilon_0\)) и проекция ускорения на направление движения положительна.
При прямолинейном движении с убывающей по модулю скоростью (рис. 6, б) направления векторов \(~\vec a\) и \(~\vec \upsilon_0\) противоположны (\(~\vec a \uparrow \downarrow \vec \upsilon_0\)) и проекция ускорения на направление движения отрицательна.
Вектор \(~\vec a\) при криволинейном движении можно разложить на две составляющие, направленные вдоль скорости \(~\vec a_{\tau}\) и перпендикулярно скорости \(~\vec a_n\) (рис. 1.7), \(~\vec a_{\tau}\) - тангенциальное ускорение, характеризующее быстроту изменения модуля скорости при криволинейном движении, \(~\vec a_n\) - нормальное ускорение, характеризующее быстроту изменения направления вектора скорости при криволинейном движении Модуль ускорения \(~a = \sqrt{a^2_{\tau} + a^2_n}\).

Литература
- Аксенович Л.А. Физика в средней школе: Теория. Задания. Тесты: Учеб. пособие для учреждений, обеспечивающих получение общ. сред, образования / Л.А. Аксенович, Н.Н.Ракина, К.С. Фарино; Под ред. К.С. Фарино. - Мн.: Адукацыя i выхаванне, 2004. - C.5-8.
Содержание и основные понятия кинематики . Чтобы обработать деталь на металлорежущем станке, необходимо предварительно настроить станок. В коробке скоростей и в механизмах подачи детали, передающие вращение от электродвигателя, соединяют так, что обеспечиваются вполне определенные перемещения детали и инструмента в течении некоторого времени. Перемещение одних тел или частей тела относительно других называется механическим движением . Раздел механики, изучающий механическое движение на основании законов геометрии, называют кинематикой . При этом не принимаются во внимание ни свойства движущихся тел, ни силы, под воздействием которых происходит движение. Так как при движении тела различные его точки могут двигаться по- разному, то в кинематике сначала изучается движение более простого объекта, а именно материальной точки.
Материальной точкой называют такое тело, размерами и формой которого можно пренебречь в данной задаче. Например, изучая движение искусственного спутника Земли, можно пренебречь его линейными размерами по сравнению с теми большими расстояниями, которые он преодолевает. В такой задаче спутник может рассматриваться как материальная точка.
Введение понятия материальной точки вносит значительное упрощение в исследование движения тел. Для решения задач о движении тела в целом достаточно знать движение одной или двух его точек.
Движущееся тело всегда проходит определенный путь в пространстве от начальной до конечной точки движения, на что затрачивается определенное время.
Таким образом, механическое движение есть перемещение тел в пространстве и во времени.
Пространство и время являются такими же необходимыми условиями существования окружающего нас мира, как и движение.
Изучая движение в пространстве и во времени, устанавливают геометрические показатели движения - пройденный путь и траекторию движения. В то же время определяют качественные зависимости движения - быстроту движения и интенсивность ее изменения. Рассматривая тело в движении, отмечают начало и конец движения, и на этом отрезке определяют особенности движения.
В материальном мире покой и движение относительны. Наблюдаемые нами неподвижные тела (здания, сооружения, неработающие машины) находятся лишь в относительном покое, то есть в покое относительно Земли. В действительности они осуществляют сложное движение вместе с Землей в мировом пространстве.
В относительном покое можно рассматривать и некоторые подвижные тела. К примеру, неподвижный пассажир в движущемся вагоне находится в движении лишь по отношению к Земле, а по отношению к вагону он в покое.
Отсюда следует, что всякое движение относительно , так как рассматривается по отношению к определенным телам. Принцип относительности движения позволяет установить особенности его различных видов. Так, конец педали велосипеда по отношению к раме описывает окружность, а по отношению к Земле - сложную кривую.
Используя принцип относительности, можно неподвижное тело принять за подвижное, если рассматривать его относительно движущегося тела.
Именно такой эффект можно наблюдать из неподвижного вагона в тот момент, когда рядом расположенный состав находится в движении: нам кажется, что состав неподвижен, а в движении находится вагон, в котором мы находимся.
Таким образом, всякий покой и движение относительны, и рассматривать механическое движение необходимо в каждом случае с учетом конкретных условий движения и времени.
К основным понятиям кинематики относятся: траектория движения, его продолжительность, пройденный путь, скорость, ускорение.
Траекторией называют линию, которую описывает движущаяся точка в пространстве (рис. 15). Траектории весьма разнообразны: они могут иметь вид прямой линии, окружности, эллипса, параболы (I), циклоиды (II) и других кривых. Длина траектории при движении материальной точки характеризует пройденный путь. При движении по прямой от одной точки пространства к другой пройденный путь равен расстоянию между точками, при движении по другим траекториям путь получается больше расстояния.
Рис. 15
Величина пути и продолжительность движения во времени определяют скорость движения.
Скорость есть быстрота перемещения тел от одной точки пространства к другой, которая определяется величиной пути, проходимого за единицу времени.
Движение тела с постоянной скоростью называют равномерным , движение с переменной скоростью - переменным .
Величина, определяющая изменение скорости с течением времени, называется ускорением .

Рис. 16
Из рассмотрения основных понятий кинематики следует, что между кинематическими величинами механического движения существует тесная связь.
Пройденный путь, скорость и ускорение зависят от времени: с течением времени путь возрастает, а скорость и ускорение могут оставаться постоянными или меняться в большую или меньшую сторону.
Закон движения точки может быть выражен графически прямой или кривой линией в координатных осях пути и времени. На рис, 16, I график движения представлен кривой AB, каждая точка которой соответствует определенному пути и времени. Например, точка а показывает, что к концу 4-й секунды движения пройден путь 35 м.
Используя графический метод, можно построить график пути в зависимости от скорости и времени (рис. 16, II), график ускорения в зависимости от времени, график скорости в зависимости от времени и ускорения (рис. 16, III и IV). Следует иметь в виду, что график движения определяет не форму траектории, а зависимость между указанными величинами.
Кинематика имеет большое прикладное значение. На ее основе изучается движение звеньев механизмов и рабочих органов машин, делаются выводы, которые используются при проектировании новых механизмов, машин, приборов и других механических устройств.
Простейшие движения твердого тела. Простейшим видом движения тела является равномерное прямолинейное движение. В таком движении, к примеру, находится поезд на Прямом участке пути и т. д. Движение, при котором тело перемещается по прямой и за равные отрезки времени проходит одинаковые пути, называется равномерным прямолинейным (рис. 17, I).

Рис. 17
Скорость равномерного движения определяется отношением пройденного пути ко времени движения. Единицы скорости устанавливаются по единицам пути и времени. Если, например, путь выражен в метрах, а время в секундах, то скорость получается в м/с. В таких единицах измеряют скорость течения воды по трубам, движение воздуха под действием вентилятора и т. д. Скорость резания металла на станках измеряют в м/мин, а скорость транспортных машин - в км/ч.
В движении тело может совершать различные перемещения с различными скоростями и ускорениями. Одно из таких перемещений - прямолинейное возвратно-поступательное движение (рис. 17, II). Наиболее типичный пример такого движения - поршень механизма двигателя внутреннего сгорания. Но в отличие от равномерного движения тела в первом примере, поршень движется неравномерно, так как при повороте кривошипа (коленчатого вала), с которым он сочленен, на равные углы, поршень проходит неравные пути.
Движение, при котором за равные отрезки времени тело проходит неравные пути, называют переменным или неравномерным . Такое движение происходит во время разбега машин или торможения.
В переменном движении скорость изменяется непрерывно, ее величина различна в каждый момент времени. Поэтому такую скорость называют мгновенной.
Движение, при котором скорость возрастает, называют ускоренны м, а прирост скорости за единицу времени называют ускорением. Численная величина ускорения определяется отношением разности мгновенных скоростей между рассматриваемыми точками пути ко времени, в течении которого происходило изменение скорости.
Движение тела по отношению к неподвижной системе отсчета называется абсолютным движением. Движение тела по отношению к движущейся системе отсчета называется относительным движением (рис. 17, III).
Криволинейное движение является одним из самых распространенных видов движения в механизмах многих машин. В криволинейном движении тело также занимает последовательные положения на траектории и в каждый момент времени имеет определенную мгновенную скорость.
Криволинейным (рис. 17, IV) принято называть такое движение, при котором тело при перемещении описывает кривую линию - траекторию относительно выбранной системы отсчета.
Рассматривая положения тела через бесконечно малые отрезки времени, можно считать, что вектор скорости совпадает с направлением движения. Но так как направление в криволинейном движении непрерывно меняется, то и вектор скорости тела при переходе его в каждое новое положение изменяет свое направление по отношению к предыдущему направлению.
Таким образом, вектор скорости тела в криволинейном движении непрерывно изменяет свое направление соответственно форме траектории, оставаясь все время касательным к ней.
Этот вывод подтверждается многочисленными примерами из практики: раскаленные частицы камня и металла отлетают от точильного круга при его вращении по касательным; потоки воды в работающем центробежном насосе устремляются из колеса по касательным к ее окружностям; частицы при отрыве от общей массы тела на криволинейной траектории также отлетают по касательной к траектории в месте отрыва.
3.3. Поступательное и вращательное движения твердого тела. Поступательным называют такое движение, при котором все точки тела имеют одинаковые траектории. Если соединить две любые точки поступательно движущегося тела прямой линией, то эта прямая остается все время параллельна самой себе (рис. 18).

Рис. 18
Сохранение параллельности прямых во всех положениях тела - главный признак поступательного движения.
В большинстве случаев точки поступательно движущегося тела имеют прямолинейные траектории (рис. 18, I). В таком движении находятся, например, поршни компрессоров и насосов, транспортные машины на прямом участке пути и т. п.
Но могут быть случаи криволинейного поступательного движения (рис. 18, II). Так движется, например, рычаг, соединяющий ведущие колеса паровоза. Он прикреплен к колесам шарнирно на равном расстоянии от осей.
Благодаря этому при перекатывании колес по рельсам рычаг остается параллельным самому себе, а все точки (см. рис. 18) описывают в пространстве кривые векторного переноса (одинаковые кривые со сдвигом).
Сохранение параллельности линий движущегося тела возможно в том случае, когда все точки этих линий, перемещаясь из одного положения в другое, проходят одинаковый путь. Отсюда следует, что в поступательном движении все точки тела имеют одинаковые скорости и ускорения, поэтому для характеристики поступательно движущегося тела достаточно знать скорость и ускорение какой-либо одной его точки.
Вращательное движение широко распространено в природе и технике. Планеты Солнечной системы вращаются вокруг своей оси. Во многих механизмах и машинах так движутся валы, шкивы, зубчатые колеса, маховики и другие детали.
Вращательное движение характеризуется тем, что все точки тела описывают концентрические окружности относительно неподвижной оси, расположенной в пределах тела. Осью вращения называется геометрическое место точек, остающихся неподвижными при вращении тела (рис. 19).

Рис. 19
Кинематическими параметрами вращающегося тела являются угловое перемещение, угловая скорость и угловое ускорение. Угловое перемещение измеряется величиной угла, на который поворачивается тело за время вращения. За единицу углового перемещения принят радиан - центральный угол, длина дуги которого равна радиусу этой дуги. 1 рад = 57,3°. Центральный угол содержит 360°: 57,3° = 6,28 или 2п рад.
Вращательное движение может быть равномерным и неравномерным. Равномерным называют такое вращение, при котором за равные промежутки времени тело поворачивается на равные углы. Величина поворота тела за единицу времени определяет угловую скорость.
Численная величина угловой скорости в равномерном вращательном движении определяется отношением углового перемещения ко времени, в течении которого происходит это перемещение.
В практических расчетах угловая скорость обычно выражается числом оборотов тела за одну минуту времени.
В котором изучается механическое движение тел без учета их масс и причин, обеспечивающих это движение.
Иными словами, в кинематике описывается движение тела (траектория движения , скорость и ускорение ) без выяснения причин, почему оно так движется.
Движением обозначают всякое изменение в окружающем материальном мире. Механическое движение - изменение положения тела в пространстве, происходящее с течением времени, наблюдаемое относительно другого тела, условно принятого за неподвижное. Условно неподвижное тело называют телом отсчета. Система координатных осей, связанная с телом отсчета, определяет пространство, в котором происходит движение.
Физическое пространство трехмерно и евклидово, т. е. все измерения осуществляются на основе школьной геометрии. Основной единицей измерения расстояний служит 1 метр (м) , единицей измерения углов - 1 радиан (рад.) .
Время в кинематике рассматривается в качестве непрерывно изменяющейся скалярной величины t . Все другие кинематические величины считаются зависящими от времени (функциями от времени). За основную единицу времени принимают 1 сек .
Кинематика изучает движение:
- точки твердого (не поддающегося деформации) тела,
- твердого тела, поддающегося упругой или пластической деформации,
- жидкости,
- газа.
Основные задачи кинематики.
1. Описание движения тела с помощью кинематических уравнений движения, таблиц и графиков. Описать движение тела - определить его положение в любой момент времени.
2. Определение кинематических характеристик движения - скорости и ускорения.
3. Изучение сложных (составных) движений и определение зависимости между их характеристиками. Сложным движением называют движение тела относительно системы координат, которая сама движется относительно другой, неподвижной системы координат.
Кинематика рассматривает следующие понятия и движения.
Кинематика - раздел механики, изучающий движение тел без учета причин, вызвавших это движение.
Основной задачей кинематики является нахождение положения тела в любой момент времени, если известны его положение, скорость и ускорение в начальный момент времени.
Механическое движение - это изменение положения тел (или частей тела) относительно друг друга в пространстве с течением времени.
Для описания механического движения надо выбрать систему отсчета.
Тело отсчета - тело (или группа тел), принимаемое в данном случае за неподвижное, относительно которого рассматривается движение других тел.
Это система координат, связанная с телом отсчета, и выбранный способ измерения времени (рис. 1).
Положение тела можно определить с помощью радиуса-вектора или с помощью координат.
Точки - направленный отрезок прямой, соединяющий начало отсчета О с точкой (рис. 2).

X точки - это проекция конца радиуса-вектора точки на ось Ох. Обычно пользуются прямоугольной системой координат. В этом случае положение точки на линии, плоскости и в пространстве определяют соответственно одним (x), двумя (х, у) и тремя (х, у, z) числами - координатами (рис. 3).

В элементарном курсе физики изучают кинематику движения материальной точки.
Материальная точка - тело, размерами которого в данных условиях можно пренебречь.
Этой моделью пользуются в тех случаях, когда линейные размеры рассматриваемых тел много меньше всех прочих расстояний в данной задаче или когда тело движется поступательно.
Поступательным называется движение тела, при котором прямая, проходящая через любые две точки тела, перемещается, оставаясь параллельной самой себе. При поступательном движении все точки тела описывают одинаковые траектории и в любой момент времени имеют одинаковые скорости и ускорения. Поэтому для описания такого движения тела достаточно описать движение его одной произвольной точки.
В дальнейшем под словом "тело" будем понимать "материальная точка".
Линия, которую описывает движущееся тело в определенной системе отсчета, называется траекторией. На практике форму траектории задают с помощью математических формул (y = f(x) - уравнение траектории) или изображают на рисунке. Вид траектории зависит от выбора системы отсчета. Например, траекторией тела, свободно падающего в вагоне, который движется равномерно и прямолинейно, является прямая вертикальная линия в системе отсчета, связанной с вагоном, и парабола в системе отсчета, связанной с Землей.
В зависимости от вида траектории различают прямолинейное и криволинейное движение.
Путь s - скалярная физическая величина, определяемая длиной траектории, описанной телом за некоторый промежуток времени. Путь всегда положителен: s > 0.
Перемещение тела за определенный промежуток времени - направленный отрезок прямой, соединяющий начальное (точка ) и конечное (точка М) положение тела (см. рис. 2):
![]() ,
,
где - радиусы-векторы тела в эти моменты времени.
Проекция перемещения на ось Ox
где - координаты тела в начальный и конечный моменты времени.
Модуль перемещения не может быть больше пути .
Знак равенства относится к случаю прямолинейного движения, если направление движения не изменяется.
Зная перемещение и начальное положение тела, можно найти его положение в момент времени t:

Скорость - мера механического состояния тела. Она характеризует быстроту изменения положения тела относительно данной системы отсчета и является векторной физической величиной.
- векторная физическая величина, численно равная отношению перемещения к промежутку времени, за который оно произошло, и направленная вдоль перемещения (рис. 4):
В СИ единицей скорости является метр в секунду (м/с).
Средняя скорость, найденная по этой формуле, характеризует движение только на том участке траектории, для которого она определена. На другом участке траектории она может быть другой.
Иногда пользуются средней скоростью пути
где s - путь, пройденный за промежуток времени . Средняя скорость пути - это скалярная величина.
Мгновенная скорость
тела - скорость тела в данный момент времени (или в данной точке траектории). Она равна пределу, к которому стремится средняя скорость за бесконечно малый промежуток времени ![]() . Здесь - производная от радиуса-вектора по времени.
. Здесь - производная от радиуса-вектора по времени.
В проекции на ось Ох:
![]()
Мгновенная скорость тела направлена по касательной к траектории в каждой ее точке в сторону движения (см. рис. 4).
Ускорение - векторная физическая величина, характеризующая быстроту изменения скорости. Оно показывает, на какую величину изменяется скорость тела за единицу времени.
Среднее ускорение - физическая величина, численно равная отношению изменения скорости ко времени, за которое оно произошло:
![]()
Вектор направлен параллельно вектору изменения скорости в сторону вогнутости траектории (рис. 5).
Кинематика точки
Кинематика – часть теоретической механики, в которой изучаются движения материальных тел без учета их масс и действующих на них сил.
Когда в механике говорят о движении тела, то подразумевают под этим изменение с течением времени его положения в пространстве по отношению к другим телам.
Обычно с телом, по отношению к которому изучают движение, связывают какую-нибудь систему координат, которую вместе с выбранным способом измерения времени называют системой отсчета. Если координаты всех точек тела в выбранной системе отсчета остаются неизменными во времени, то тело находится в покое.
Если рассматривается движение тела по отношению к условно неподвижной системе отсчета, то движение называют абсолютным
; движение тела по отношению к подвижной системе отсчета называют относительным
.
В мире все находится в непрерывном движении, поэтому все движения являются относительными, однако условно можно представить себе и абсолютное движение, например, движение по отношению к Земле.
Итак, движение тело совершается в пространстве с течением времени. Пространство и время, как и движение, согласно учению диалектического материализма – формы существования материи.
Классическая механика полагает, что пространство и время имеют абсолютный, независимый друг от друга характер, и что их свойства не зависят от распределения и движения материи.
Такая точка мировоззрения господствовала в науке до начала XX века, пока гениальный А. Эйнштейн (1879-1955) не поставил ее под сомнение своей теорией относительности. Этот человек сломал вековое представление человечества о самом главном – об абсолютности времени и пространства. Теория относительности Эйнштейна – это современная физическая теория пространства и времени, связывающая эти доселе незыблемые независимые постулаты с движением, массой и энергией.
До А. Эйнштейна считалось, что все в мире относительно. Если тело движется по отношению к какой-либо подвижной системе, то оно имеет другой характер движения по отношению к той системе, относительно которой движется данная система. Это утверждение являлось одним из китов, на которых восседала наука до начала прошлого века.
Теория относительности Эйнштейна основывается на том, что скорость света является постоянной величиной, не зависящей от скорости источника этого света. На основании этого противоречащего здравому смыслу вывода можно утверждать, что и пространство, и время – суть понятия относительные, зависящие от скорости света.
Гениальность Эйнштейна заключается в том, что он увидел и объял неочевидное. Современная физика, на основании множества экспериментов, опытов и исследований полностью подтвердила его теорию.
Тем не менее, несмотря на открытия Эйнштейна, классическая механика не потеряла свою актуальность, так как при скоростях движения, далеких от скорости света, результаты, даваемые классической механикой, ничтожно мало отличаются от результатов механики теории относительности и вполне пригодны для практики. Можно сказать, что классическая механика является частным случаем механики теории относительности, предполагающая упрощенные расчеты с допустимыми погрешностями.
Основные определения кинематики
Чтобы понять смысл определений кинематики следует ознакомиться с понятиями и определениями другого раздела технической механики – теорией механизмов и машин, которая занимается приложением законов теоретической механики для практических расчетов деталей, механизмов и машин.
Механизмом называется совокупность связанных между собой тел, имеющих определенные движения и служащих для передачи и преобразования движения.
Машиной
называют механизм или сочетание механизмов, служащих для преобразования энергии (энергетические машины), изменения формы, свойств, состояния и положения предмета труда (рабочие машины), или для сбора, переработки и использования информации (информационные машины).
Таким образом, любая машина состоит из одного или нескольких механизмов, но не всякий механизм является машиной, т. е. машина – понятие более широкое.
Простейшей частью любой машины является ее звено
– одно тело или неизменяемое во время работы машины сочетание группы тел.
Два звена, соединенные между собой и допускающие относительное движение, называются кинематической парой
.
Кинематические пары бывают низшие
и высшие
. Звенья низших пар соприкасаются по поверхностям (поступательные, вращательные и винтовые пары), звенья высших пар соприкасаются по линиям и точкам (зубчатые пары, подшипники качения и т. п.).
Совокупность кинематических пар называется кинематической цепью
.
Кинематические пары и цепи могут быть плоскими и пространственными. Механизм – это кинематическая цепь, у которой одно из звеньев лишено движения (закреплено). Такое звено называют станиной
или стойкой
.
Звено, вращающееся вокруг неподвижной оси, называют кривошипом
, качающееся вокруг неподвижной оси – балансиром
или коромыслом
.
Звено, совершающее сложное движение параллельно какой-то плоскости, называют шатуном
. Звено, совершающее возвратно-поступательное движение по станине или стойке, называют ползуном
.
Ведущим звеном механизма считается то, которому извне сообщается определенное движение, передаваемое посредством этого звена другим звеньям, называемым ведомыми .
Кинематика изучает закономерности относительного движения и перемещения отдельных звеньев механизмов, без учета сил, вызывающих эти движения и перемещения.
Основными физическими величинами, которыми оперирует кинематика, являются расстояние (длина) и время. Единицей измерения длины в системе СИ является метр (м) , единицей измерения времени – секунда (с) .
Способы задания движения точки
Знание законов движения тела означает знание законов движения каждой его точки, поэтому изучение кинематики основывается на изучении геометрии движения точки.
Траекторией точки называется множество (геометрическое место) положений движущейся точки в рассматриваемой системе отсчета. Проще говоря, траектория движения – это линия, которую описывает подвижная точка относительно выбранной системы отсчета. В зависимости от формы траектории различают прямолинейное и криволинейное движение.
Движение любой точки тела можно описать (задать) тремя способами – естественным, векторным и координатным (см. рисунок 1) .

Естественный способ
(рис. 1а)
заключается в том, что движение точки задается ее траекторией, началом отсчета и уравнением движения по этой траектории (законом движения).
В общем виде уравнение движения записывается так: s = f(t)
, где s
– расстояние от точки до начального положения (начала отсчета), являющееся функцией времени; t
– время движения точки от начального отсчета.
Зная траекторию и закономерность (уравнение) движения точки по этой траектории, можно в любой момент времени определить, где она находится.
При своем движении точка проходит некоторый путь, который также является функцией времени. Следует отметить, что путь, пройденный точкой, совпадает с расстоянием от начала отсчета лишь в том случае, если траектория движения точки представляет собой прямую линию, и точка движется по ней в одном направлении, а начало движения точки совпадает с началом отсчета.
Векторный способ (рис. 1б) основывается на том, что положение точки в пространстве однозначно определяется радиусом-вектором r , проведенным из некоторого неподвижного центра к данной точке. При этом положение точки в данный момент времени определяется направлением и модулем вектора. Математически функция изменения радиуса-вектора от времени записывается так:
Координатный способ (рис. 1в) заключается в том, что движение точки задается движением ее проекций вдоль осей координат. В общем виде уравнение движения точки можно записать следующим образом:
x = f(t), y = f 1 (t), z = f 2 (t).
Зная уравнения движения точки в координатной форме, можно, подставив в эти уравнения время, определить положение проекций точки, а следовательно, и самой точки в любой момент времени.
Если точка движется в плоскости, то для определения ее местоположения в данный момент времени достаточно знать две координаты, если движение происходит по прямой – достаточно одной координаты.