III. Траектория, путь и перемещение
Положение материальной точки определяется по отношению к какому-либо другому, произвольно выбранному телу, называемому телом отсчета . С ним связывается система отсчета – совокупность системы координат и часов, связанных с телом отсчета.
В декартовой системе координат положение точки А в данный момент времени по отношению к этой системе характеризуется тремя координатами x, y и z или радиусом-вектором r – вектор, проведенный из начала системы координат в данную точку. При движении материальной точки ее координаты с течением времени изменяются.r =r (t) или x=x(t), y=y(t), z=z(t) – кинематические уравнения материальной точки .
Основная задача механики – зная состояние системы в некоторый начальный момент времени t 0 , а также законы, управляющие движением, определить состояния системы во все последующие моменты времени t.
Траектория движения материальной точки – линия, описываемая этой точкой в пространстве. В зависимости от формы траектории различают прямолинейное и криволинейное движение точки. Если траектория точки – плоская кривая, т.е. целиком лежит в одной плоскости, то движение точки называют плоским.
Длина участка траектории АВ, пройденного материальной точкой с момента начала отсчета времени, называется длиной пути Δs и является скалярной функцией времени: Δs=Δs(t). Единица измерения – метр (м)– длина пути, проходимого светом в вакууме за 1/299792458 с.
IV . Векторный способ задания движения
Радиус-вектор r – вектор, проведенный из начала системы координат в данную точку. Вектор Δr =r -r 0 , проведенный из начального положения движущейся точки в положение ее в данный момент времени называется перемещением (приращение радиуса-вектора точки за рассматриваемый промежуток времени).
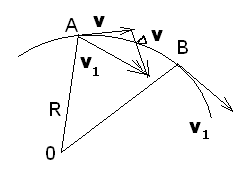
Вектором средней скорости < v > называется отношение приращения Δ r радиуса-вектора точки к промежутку времени Δt: (1). Направление средней скорости совпадает с направлением Δr .При неограниченном уменьшении Δt средняя скорость стремиться к предельному значению, которое называется мгновенной скоростью v . Мгновенная скорость это скорость тела в данный момент времени и в данной точке траектории: (2). Мгновенная скоростьv есть векторная величина, равная первой производной радиуса-вектора движущейся точки по времени.
Для
характеристики быстроты изменения
скорости v
точки
в механике вводится векторная физическая
величина, называемая ускорением.
Средним ускорением неравномерного движения в интервале от t до t+Δt называется векторная величина, равная отношению изменения скорости Δv к интервалу времени Δt:
Мгновенным ускорением а материальной точки в момент времени t будет предел среднего ускорения:(4). Ускорениеа есть векторная величина, равная первой производной скорости по времени.
V. Координатный способ задания движения
Положение точки М можно характеризовать радиус – вектором r или тремя координатами x, y и z: М(x,y,z). Радиус - вектор можно представить в виде суммы трех векторов, направленных вдоль осей координат: (5).
Из
определения скорости
![]() (6).
Сравнивая (5) и (6) имеем:(7). Учитывая (7) формулу (6) можно записать(8).
Модуль скорости можно найти:(9).
(6).
Сравнивая (5) и (6) имеем:(7). Учитывая (7) формулу (6) можно записать(8).
Модуль скорости можно найти:(9).
Аналогично для вектора ускорения:
![]() (10),
(10),
![]() (11),
(11),
Естественный способ задания движения (описание движения с помощью параметров траектории)
Движение
описывается формулой s=s(t).
Каждая точка траектории характеризуется
своим значением s.
Радиус – вектор является функцией от
s
и траектория может быть задана уравнением
r
=r
(s).
Тогда r
=r
(t)
можно представить как сложную функцию
r
.
Продифференцируем
(14). Величина Δs
– расстояние между двумя точками вдоль
траектории, |Δr
|
- расстояние
между ними по прямой линии. По мере
сближения точек разница уменьшается.
,
гдеτ
–
единичный вектор, касательный к
траектории.
,
тогда (13) имеет видv
=τ
v
(15). Следовательно скорость направлена
по касательной к траектории.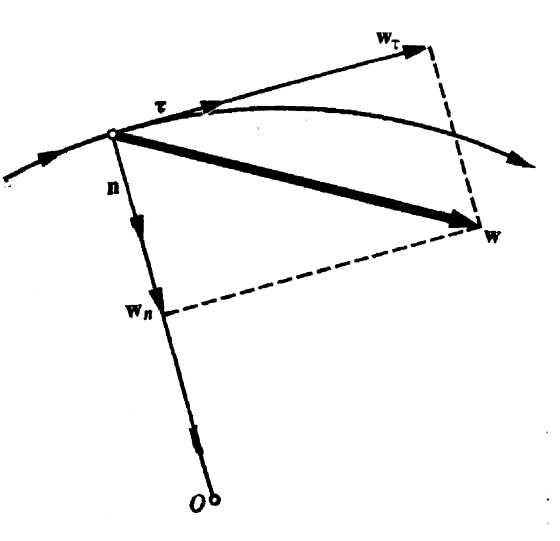
Ускорение
может быть направлено под любым углом
к касательной к траектории движения.
Из определению ускорения
![]() (16). Еслиτ
-
касательный к траектории, то
- вектор перпендикулярный этой касательной,
т.е. направлен по нормали. Единичный
вектор, в направлении нормали обозначаетсяn
.
Значение вектора
равно 1/R,
где R
– радиус кривизны траектории.
(16). Еслиτ
-
касательный к траектории, то
- вектор перпендикулярный этой касательной,
т.е. направлен по нормали. Единичный
вектор, в направлении нормали обозначаетсяn
.
Значение вектора
равно 1/R,
где R
– радиус кривизны траектории.
Точка,
отстоящая от траектории на расстоянии
и R
в направлении нормали n
,
называется центром кривизны траектории.
Тогда
(17). Учитывая вышеизложенное формулу
(16) можно записать:![]() (18).
(18).
Полное ускорение состоит из двух взаимно перпендикулярных векторов: , направленного вдоль траектории движения и называемого тангенциальным, и ускорения, направленного перпендикулярно траектории по нормали, т.е. к центру кривизны траектории и называемого нормальным.
Абсолютное
значение полного ускорения найдем:
![]() (19).
(19).
Лекция 2 Движение материальной точки по окружности. Угловое перемещение, угловая скорость, угловое ускорение. Связь между линейными и угловыми кинематическими величинами. Векторы угловой скорости и ускорения.
План лекции
Кинематика вращательного движения
При
вращательном движении мерой перемещения
всего тела за малый промежуток времени
dt
служит векторdφ
элементарного поворота тела. Элементарные
повороты
(обозначаются
или)
можно рассматривать какпсевдовекторы
(как бы).
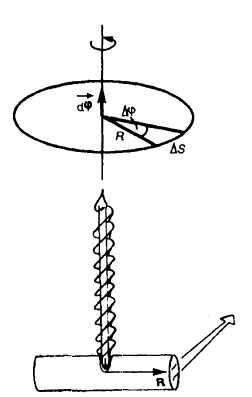
Угловое перемещение - векторная величина, модуль которой равен углу поворота, а направление совпадает с направлением поступательного движения правого винта (направленный вдоль оси вращения так, что если смотреть с его конца, то вращение тела кажется происходящим против часовой стрелки). Единица углового перемещения – рад.
Быстроту
изменения углового перемещения с
течением времени характеризует угловая
скорость
ω
.
Угловая скорость твердого тела –
векторная физическая величина,
характеризующая быстроту изменения
углового перемещения тела с течением
времени и равная угловому перемещению,
совершаемому телом за единицу времени: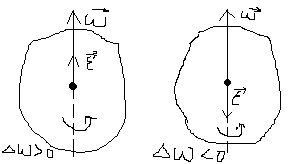
Направлен вектор ω вдоль оси вращения в ту же сторону, что и dφ (по правилу правого винта). Единица угловой скорости- рад/с
Быстроту изменения угловой скорости с течением времени характеризует угловое ускорение ε
(2).
Направлен вектор ε вдоль оси вращения в ту же сторону, что и dω, т.е. при ускоренном вращении , при замедленном.
Единица углового ускорения – рад/с 2 .
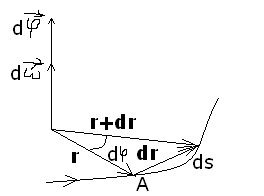
За время dt произвольная точка твердого тела А переместиться на dr , пройдя путь ds . Из рисунка видно, что dr равно векторному произведению углового перемещения dφ на радиус – вектор точки r : dr =[ dφ · r ] (3).
Линейная
скорость точки
связана
с угловой скоростью и радиусом траектории
соотношением:
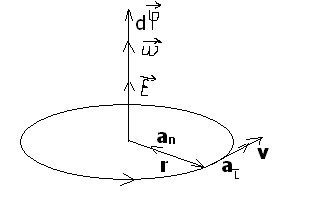
В векторном виде формулу для линейной скорости можно написать как векторное произведение: (4)
По определению векторного произведения его модуль равен , где - угол между векторами и, а направление совпадает с направлением поступательного движения правого винта при его вращении от к .
Продифференцируем (4) по времени:
Учитывая, что - линейное ускорение,- угловое ускорение, а- линейная скорость, получим:
Первый вектор в правой части направлен по касательной к траектории точки. Он характеризует изменение модуля линейной скорости. Следовательно, этот вектор – касательное ускорение точки: a τ =[ ε · r ] (7). Модуль касательного ускорения равен a τ = ε · r . Второй вектор в (6) направлен к центру окружности и характеризует изменение направления линейной скорости. Этот вектор – нормальное ускорение точки:a n =[ ω · v ] (8). Модуль его равен a n =ω·v или учитывая, что v = ω· r , a n = ω 2 · r = v 2 / r (9).
Частные случаи вращательного движения
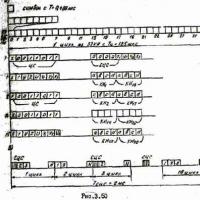
При равномерном вращении: , следовательно .
Равномерное вращение можно характеризовать периодом вращения Т - временем, за которое точка совершает один полный оборот,
Частота вращения - число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени: (11)
Единица частоты вращения - герц (Гц).
При равноускоренном вращательном движении :
Лекция 3 Первый закон Ньютона. Сила. Принцип независимости действующих сил. Результирующая сила. Масса. Второй закон ньютона. Импульс. Закон сохранения импульса. Третий закон Ньютона. Момент импульса материальной точки, момент силы, момент инерции.
План лекции
Первый закон Ньютона
Второй закон Ньютона
Третий закон Ньютона
Момент импульса материальной точки, момент силы, момент инерции
Первый закон Ньютона. Масса. Сила
Первый закон Ньютона: Существуют такие системы отсчета, относительно которых тела движутся прямолинейно и равномерно или покоятся, если на них не действуют силы или действие сил скомпенсировано.
Первый закон Ньютона выполняется только в инерциальной системе отсчёта и утверждает существование инерциальной системе отсчёта.
Инерция – это свойство тел стремиться сохранять скорость неизменной.
Инертностью называют свойство тел препятствовать изменению скорости под действием приложенной силы.
Масса тела – это физическая величина являющаяся количественной мерой инертности, это скалярная аддитивная величина. Аддитивность массы состоит в том, что масса системы тел всегда равна сумме масс каждого тела в отдельности. Масса – основная единица системы «СИ».
Одной из форм взаимодействия является механическое взаимодействие . Механическое взаимодействие вызывает деформацию тел, а также изменение их скорости.
Сила – это векторная величина являющаяся мерой механического воздействия на тело со стороны других тел, или полей, в результате которого тело приобретает ускорение или изменяет свою форму и размеры (деформируется). Сила характеризуется модулем, направлением действия, точкой приложения к телу.